No edit summary |
No edit summary |
||
| (One intermediate revision by the same user not shown) | |||
| Line 1: | Line 1: | ||
| + | [[PySwarm Interface Application (Main Page)|Back to PIA's main page]] __TOC__ |
||
| − | [[File:Placeholder|video|right|300px]] [[File:Placeholder|right|300px]] |
||
| ⚫ | |||
| + | [[File:PIA_Landing_Tab.jpg|frame|left|PIA Landing Tab]] |
||
| − | ==Minimum Landing Time== |
||
| + | |||
| ⚫ | |||
| + | |||
| − | ==Maximum Landing Time== |
||
| + | |||
| ⚫ | |||
| + | |||
| − | ==Ground Level== |
||
| + | |||
| ⚫ | This z-axis value (in feet) defines the ground level for the simulation. When a BOID strikes (or moves below) this altitude, it is placed on the ground, |
||
| + | |||
| − | ==Takeoff Angle== |
||
| + | |||
| − | This is the angle (in degrees) BOIDs will initiate at the end of their LANDING period. |
||
| + | |||
| − | ==Initiate Landed== |
||
| + | |||
| ⚫ | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | ==Overview== |
||
| + | |||
| ⚫ | |||
| + | ==Landing Timer Parameters== |
||
| + | Landing timer parameters set the minimum and maximum time BOIDs remain landed. |
||
| + | |||
| ⚫ | |||
| ⚫ | |||
| + | ==Other Parameters== |
||
| + | Several other parameters |
||
| ⚫ | |||
| + | *<u>Takeoff Angle</u>: This is the pitch angle (in degrees) BOIDs will take when their landing cycle has ended. |
||
| ⚫ | |||
| + | ===Tips and Limitations=== |
||
| + | #If LANDED is deactivated, these parameters have no effect. |
||
| + | #Settings for other parameters may effect how the LANDING works. For example, you will not get any LANDING effects if you have set the ground level to be below any safe zones, or if "Limit 2D Motion" is checked. |
||
==Examples== |
==Examples== |
||
Latest revision as of 21:55, 27 December 2013
{kind=link}
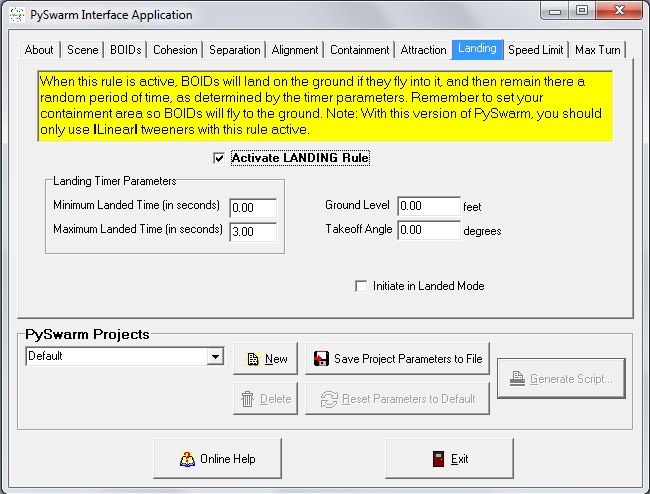
PIA Landing Tab
Overview[]
When LANDING is activated, BOIDs will land on the ground if they fly to (or strike) it. When BOIDs land, they will remain there for some random period of time, as determined by the rule's parameters.
Landing Timer Parameters[]
Landing timer parameters set the minimum and maximum time BOIDs remain landed.
- Minimum Landing Time: The minimum amount of time a BOID will remain on ground when landed (in seconds).
- Maximum Landing Time: The maximum amount of time a BOID will remain on ground when landed (in seconds).
Other Parameters[]
Several other parameters
- Ground Level: This z-axis value (in feet) defines the ground level for the simulation. When a BOID strikes (or moves below) this altitude, it is placed on the ground, setting the BOID's pitch and bank to zero, and it's timer is initiated.
- Takeoff Angle: This is the pitch angle (in degrees) BOIDs will take when their landing cycle has ended.
- Initiate Landed: This parameter initiates (at the time specified by the sim_start_time parameter) all of the BOIDs in landed mode. The amount of time they remain in landed mode is set with the Landing Timer Parameters above.
Tips and Limitations[]
- If LANDED is deactivated, these parameters have no effect.
- Settings for other parameters may effect how the LANDING works. For example, you will not get any LANDING effects if you have set the ground level to be below any safe zones, or if "Limit 2D Motion" is checked.